To make relistic humanoid robots or animals you do have to know a little or perhaps a great deal about the human or animal body and how the parts work together.
So here we are going to do a quick crash course on bodies….be they human or dog or horse or fish or bird or earthworm….or maybe even alien (joke).
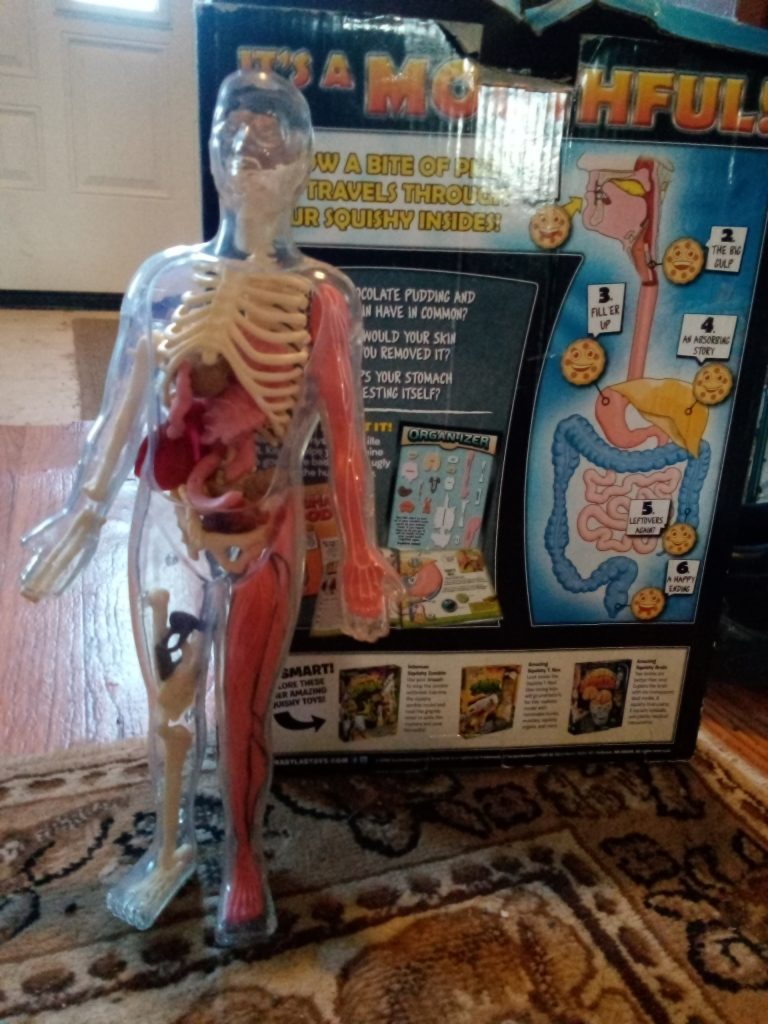
Quick facts…there are 206 bones in the human body with over half in the hands and feet. (there could be the odd human with an extra rib possibly due to an early age injury and malgrowth).

There are 560 muscles in the body and most of them are below the waist.
Then there are tendons and certain joints that move and some impossible human moves.
Etc etc etc.
We will talk about how the legs are angles for a human versus a dog or a horse or a kangaro…and a few things about birds and fish.





Eventually if you want to make a “near perfect” human like robot, then you will need to look at adding some or all of these parts or characteristics to your robot: (of course you can cheat by covering most of the body with clothing…shrit/pants/shoes/hat) or sunglasses. Or by sitting.
- realistic skin and hair that would be spongy or have the right texture
- a 98.6 temperature to its body which could be measured at the head or tongue level
- a beating sound with movement like a pulse at various points like the wrist or heart area
- some blood like liquid to come out if there is a cut and it should look and flow like blood
- there should be some sense of sweat shown on the face/under arm(shirt) during stress or exercise
- there could be movements in the body mass while moving like a flabby stomach, beating heart
- a voice that modulates or even coughs or sneezes or hiccups
- possibility of excreting human fluids like vommit, spit, urine
- eyeballs that tear up or pupils that can dilate and a realistic eyelid blinking motion
- skin that can produce goosebumps or hair can stand on end or a cat robots fur could rise
- moist air that could be detectable coming from the nose and mouth and show against a mirror
- a tongue with markings on it and moisture
- a movable adams apple in the neck of male robot
- possibility of being anatomically correct
- movement in the toes which is almost never considered even though fingers must always move
- the showing of pulsed lips and cheeks for whistling or playing a saxophone
- a detectable fingerprint on every finger
In the next section we will explain more about the human and animal bodies from the cellular level to the basic body systems like the skeletal system, the nerous system, the respiratory system etc. Again remember that the goal here is to understand more about how the real human body works and then to apply it to the robot.
We humans have eyes which must factor in the robot with its cameras and its vision system and then with the brain or the robots ai system if it has one. The robot must be able to detect an objects color and location and be able to access it without falling over. It must know that something is a skunk or a pile of broken glass and decide not to get near it or touch it.
We have arms which can lift a certain amount of weight and fingers which can distinguish a hard tomatoe from a soft one and can pick it up which is what a robot must do with its grippers.
So lets go to the next section if you want to explore more about the human and then animal bodies.