Soft robotics, mimetic humanoids and bio inspired robotics are terms that are starting to get more attention by the leading robotocists worldwide in 2021.
These ideas are basically about making robots out of materials other than metals and plastics and making them softer so that they can be more like humans in that they can bend without breaking and move about more like us.
Apparently the human body only has about 15% of it using rigid materials and the rest being flexible.
Here is a great video about soft robots. https://www.youtube.com/watch?v=058hRtaCWC0
Most robots produced to this day have been made by engineers using traditional heavy and rigid materials like metals and plastics and servos and actuators which only allows for certain kinds of robotic looking movement.
A great resource website is the Soft Robotics Toolkit site operated by the Harvard Biodesign group. https://softroboticstoolkit.com



Most heavy robots of today can break if they fall over or hurt people because of their weight and the lack of a soft cushiony body and limbs.
So in this section we will talk about both soft robotics and mimetic humanoids which like the word “mimic” or copy, deal with copying or at least being “inspired” by nature in the design of the robot.
Now the term mimetics is from the Greek language and deals with mimicry or copying and one could get into a very deep philosphical discussion about the word as apparently Aristotle and Plato did.
When you delve into the word more deeply you will see that the Greek philposophers talked about how art could imitate life which could then lead you into a deeper discussion of the topic of the “uncanny valley” which asks just how close should your robot look to a real human before it starts too look too creepy.
But anyhow although engineers are great people, most of them seem to follow the traditional ways of robot making using the tried and true metals and plastics and servos and linear actuators etc.
Now when it comes to mimetic humanoids there seem to be two schools of thought….one where you want to copy nature exactly (bio-mimicry) and the other where you simply want to be inspired by nature (bio inspired) and make a robot which can perform even better than a human.
The best example of the mimetic humanoid robot came out from Japan in 2016 where they released two robots named Kenshiro and Kengaro.
Now they approach the area of robot design from a human context and they address the areas of: musculoskeletal structure, the nervous system, and how the brain processes information.
In terms of the musclskeletal system, they pretty well said that you need to create a backbone for your robot if you expect it to be able to bend and perform actions more like a human.



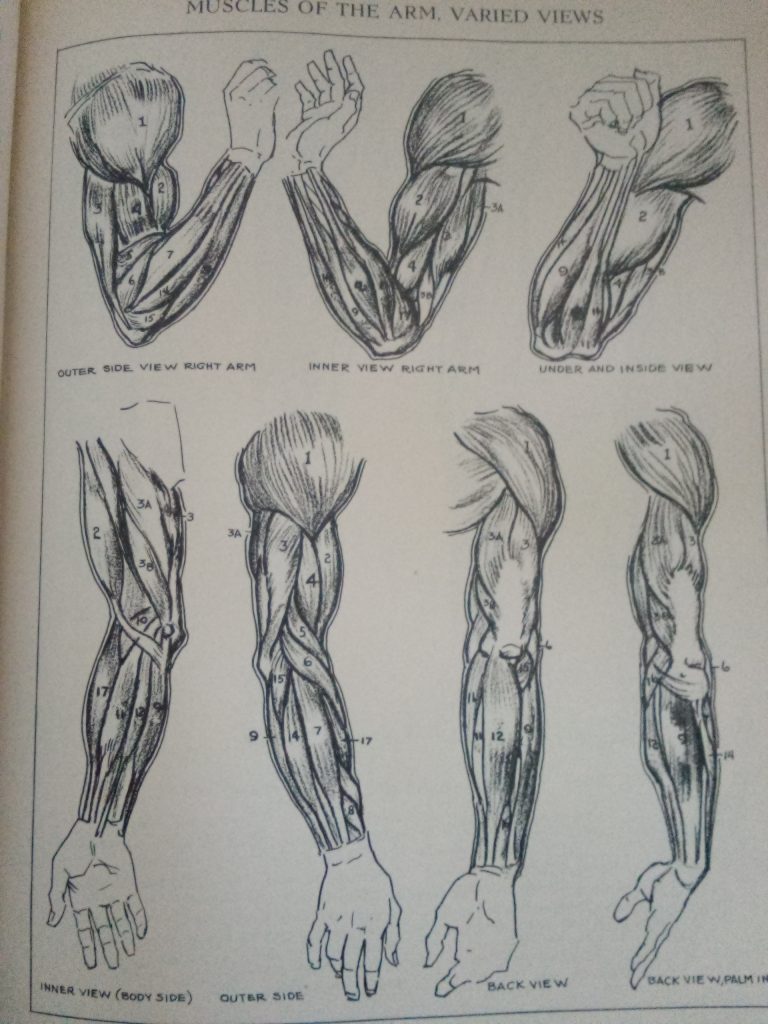
So start with that and then learn how to add tendons and imitation muscles and more.
Then you address the limbs of your robot including its head and discuss the term DOF or degrees of freedom.
Apparently the human body has 548 joint DOF while the Kengaro robot has 174 DOF
There are about a dozen different kinds of actuators like pneumatic bending ones, fiber reinforced, pneumatic artificial muscles, SDM fingers, tunable segmented soft actuators etc
One of the best websites to learn more about soft robotics is this one https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202000128
Here is a Youtube user Automaton Robotics from 2019, with some amazing work done with artificial muscle and the movement of a robotic arm. https://www.youtube.com/watch?v=gd9d_BAXWvg
Here they discuss things like MEMS which are micro electro mechanical systems which allow for the integration of sensors and actuators with PCB integrated circuits.
From there you can go all the way down to the minituraization of circuits into the areas of nanotechnology and hyrbidized human cellular and computerization.
Now back to the Kengaro robot discussion…there are two classifications of muscle skeletal robots.
There are the traditional “axial derived” robots and the “tendon derived” robots which have many more DOF.
Now in the Kengaro robot they have added muscle like components which are about half the number used in the human body.
You can look into the area of “Jacobian” muscles that were used in the Kengaro robot.
Apparently the Kengaro is able to stand on its toes and they designed it with a full set of 5 fingers on each hand and 5 toes on each foot.
The motor required for the big toe alone was 60 watts, so of course with all the motors combined in the body, it can be a problem dealing with the excessive heat created.
So to allow the Kengaro to operate on its 20 minute battery, they were somehow able to circulate water throughout the robots system which they discuss in their youtube video where it talks about the robot that “sweats” during pushups. https://www.youtube.com/watch?v=EgxsiREG2P8
Engineers are realizing that we need to create robots which use less metal and hard surfaces and more softer robots to resemble the softer characteristics of actual humans.
There are about a dozen different kinds of actuators that can be used in soft robotics applications like pneumatic bending ones, fiber reinforced, pneumatic and magnetic , SDM fingers, tunable segmented soft actuators etc
One of the best websites to learn more about soft robotics is this one https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202000128
Here they discuss things like MEMS which are micro electro mechanical systems which allow for the integration of sensors and actuators with PCB integrated circuits.
From there you can go all the way down to the miniturization of circuits into the areas of nanotechnology and hyrbidized human cellular robots.
This article gives a good breakdown of the categories of soft robotics actuators : “Soft Actuators for Soft Robotic Applications: A Review Nazek El-Atab etc
23 August 2020 https://doi.org/10.1002/aisy.202000128Ci
- electrically responsive actuators (DEA & mechanical servo & neuro)
- magnetically responsive
- heat responsive (various polymers)
- photo responsive
- visible light driven
- NIR driven
- pressure driven
- pneumatics
- hydraulics
- explosive
In the cellular category you can learn more about terms like polymer nanotechnology, didlock copolymers and triblock copolymers, thermoplastic elastomers and physically cross linked rubber.
Lets now talk more about the use of various soft robot technologies and materials like artificial muscles including the McKibben muscle , the Hasel muscle and more.
The Mckibben muscle looks like an inner tube from a bicycle and can be seen here in this video on youtube showing the building of a Mckibben muscle. https://www.youtube.com/watch?v=sAHNJdxF6Cw
The Hasel muscle has soft plastic pouches filled with electrically insulating fluids and can lift more than 200 pounds.
Robot builders are looking more at the animal kingdom now and how land , sea and water creatures can navigate their environments.
Roboticists into soft robotics are specifically looking at the sea cucumber and the octopus and how they are able to move in their environment.
A robotcist named Chris Atkeson created a blowup air type robot called Baymax that you can look up on Youtube.
In other soft robotics cases they are changing the perception of what or how a gripper/hand should work and are using more soft fleshy hands instead of fingers to pick things up.
Of course we are seeing the merging of electronics and biology in the robots world for the good or bad of mankind.
Elon Musk was the one of the first to talk about his brain/computer neurolink idea and he will certainly not be the last.