ROS ™ or Robot operating System software is basically a set of software libraries and tools that make it easier for you to build robotic applications.
It has been an open source project run by ROS.org since about the year 2000 and the purpose of it is to make code available to everyone to help further the development of robotics applications.
Now ROS is a standard that most but not all robot builders can follow to make it easier to build and control robots from the perspective of software.
Those robotics companies who choose not to use ROS tend to prefer to create their own in-house custom robot control software that gives them the ultimate control of every part of the robot.
For example Engineered arts does not use ROS as their main platform because they have created their own cloud based control software called Tritium.
Boston Dynamics has
ROS was started in Stanford University and had two main research project arms called STAIR and PR.
There was some University and private investment involved and an organization called Willow Garage got involved in 2007.
Now ROS is set up so that you don’t have to reinvent the wheel to get your robot to do certain simple or complex things. The benefit allows teams to work on different parts of the robot and come together by letting ROS wrap it into a big package.
This is why you often hear the definition of ROS as “it is technically called a framework structure to manage complex robotic systems from a simple interface. It is called open source middleware and is sort of the glue that connects other software.”
There is both a ROS1™ and an ROS2 ™
Many criticized ROS1 as being more for research purposes and not for production ready robots but this was not so much the case with ROS2 which was better at production level tasks.
Some companies like the Canadian company Clearpath™ do many great and amazing things and they write ROS applications to go along with their clients robots to make those robots do more things and be easier to operate.
These guys at Clearpath seem to be on the same brain wavelength as Elon Musk and are set to make it to the financial stratosphere which speaks well for where they came from…most of the founders attended Waterloo University, a well known hot bed in Canada for helping to create hi tech superstars.
Another Waterloo alumnist is Mark Tilden, a Canadian robotics trailblazer with a sassy personality who created the 1990’s WowWee Company Robosapien robots and other simply amazing humanoid robot toys that are talked about a lot on this website.
Now learning ROS will become increasingly important if you want to get a higher end job in the robotics industry.
Now you can simply get a job operating a robot controlled with ROS or you could maintain the software or develop entirely new software to work with the ROS.
A group of ROS professionals known as “the Construct” have dozens of excellent youtube videos online about ROS and host various robotics ejournals like “robotreport” which help people keep track of the players in the ROS game.
They list some of the following as the robotics companies to watch who use ROS: Clearpath Robotics, Fetch Robotics, PAL Robotics, Robotis and others.
Now you can download your own copy of ROS for Windows 10 or Macos and for the linux Ubuntu setup but it is not an easy procedure.
Experts advise that you start learning ROS thru an ROS simulator at an organization like theConstructsim.com where you can also learn a lot about ROS or at sites offered by Pranshu Tople.
Here you will use some training robots that can be controlled by ROS like Turtlebot and some Mindstorm robots
ROS is complicated unless you already have some background in robotics which is what this website is all about.
You will eventually use a ROS simulator and move your mouse around the screen to control a robot as you add some code to make it do something.
Almost everyone will come across the affordable training robot for ROS called Turtlebot 3. Some trivia is that a Chinese company called Yujin created a robot called Kabuki which was the base unit for the Turtlebot.
You will soon need to know something about the language called Python and eventually the much more involved language of C++ and how to move around with the Linux dot prompt if you plan to go further in software maintenance or development.
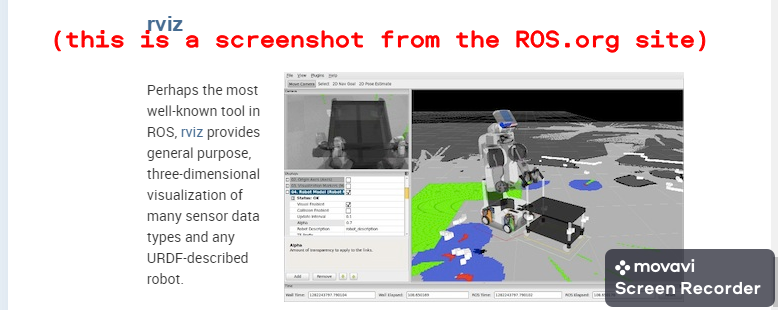
You will soon find your head hurting with the many terms and phrases you hear like…Open AI knowledge, Tensorflow, kinetic versus melodic ROS , ROS melodic or noetic, URDF, ROSjects, Gazebo, RViz, ROS noetic, Kalman filters, MoveIT, nodes and topics, publisher and subscriber, launch and bag files, navigation stacks and SLAM algorithms, Catkin, visualization versus simulation etc
Now once you start learning ROS you will soon find that rviz is the most well known tool and you may take courses on topics like robot dynamics,kinematics, dynamics and control, manipulators and robot arms and Linux and languages like Python, C++ and maybe the oldie Lisp.
You will quickly be amazed that you can find many programs that allow you to simulate real world robots and move them around your computer screen in a CAD like program including some of the most famous robots shown on tv in 2021.
This is where you install ROS on your computer and start looking up the files for some of the famous humanoid or roving animal robots and then with RVIZ you will be able to move the legs of the robot up and down on the computer screen.
Rviz is the visualization program and Gazebo is the simulation program.
You will start to explore the world of open source programs and you will find that many people have created walking animal robots and put the files and drivers up on the internet for others to share as open source.
There are sites like Champ and linorobot that will allow you to create your robot projects much faster.
You will be able to visualize your robot moving around the screen with the ROS Gazebo program using your keyboard or you could even add a joystick to your computer and move your robot around the screen with your joystick.
Then you would go from the visualization stage to the simulation stage and have the robot do more movements. It is really quite amazing!
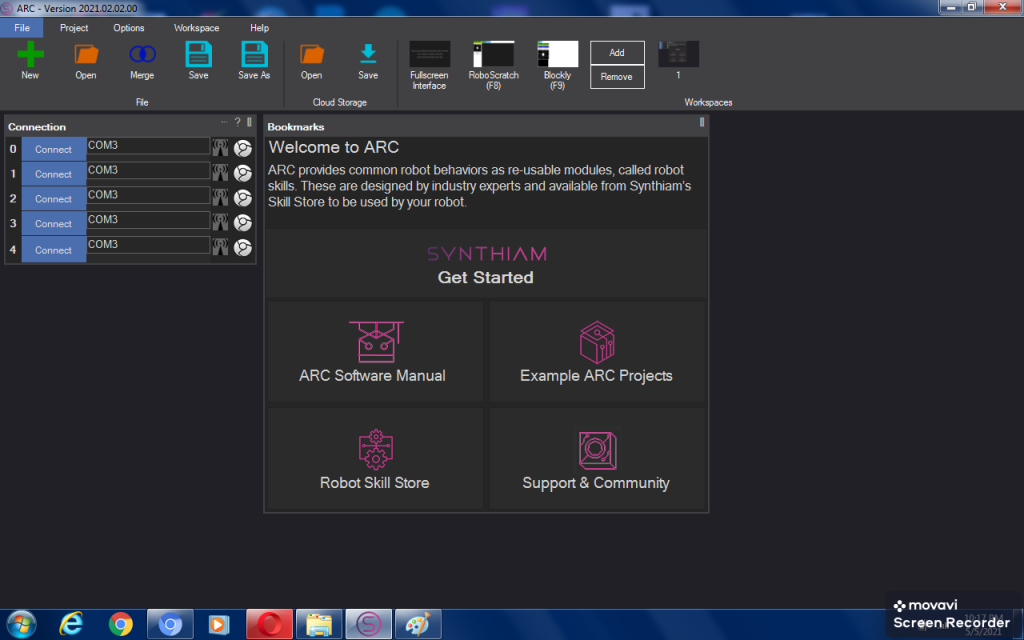
Now in terms of older toys, many people are hacking them and adding arduino boards and then getting special graphical type software to control them like the kind from EZ Robot with their Synthiam™ software.
The Robosapien and Meccanoids added app features so you could control them and move their arms or legs from a far distance using your cellphone. This is very much like what you would do if you get a job as a rmote robot “wrangler”. You will be able to monitor, fix or manipulate your robot or team of robots from a graphical user interface away from where the robots are.

Newer robots after that had certain features attached to the cloud. The problem there was that many of these companies went out of business and therefore some of the more powerful features were no longer supported and the toy became much less useful.
Another type of robot control software is found in the 3d printed humanoid movement in France with the organization www.Inmoov.fr.
Many of the group members assemble their 3D printed humanoids and use arduino boards to control the robots servos and actuators but then need extra software to control them easier. One can do it yourself and pull down libraries into your arduino but you can also use the control software from Inmoov called MRL (machine Robot language) while some others seem to prefer the Synthiam EZ Robot software from the company whos creator also graduated from Waterloo in Canada! What was IN that water! ha
It seems that the interface is an important piece of the robotics control puzzle and ease of use.
Hanson Robotics and Engineered Arts have their software as well so that their clients can control their robots from afar.
Boston Dynamics has one of their robot dogs working with ROS that ClearPath had developed for them.
The University of Texas has been operating a robotics program on campus called the BWI “Building Wide Intelligence” project in which the goal is to create a team of fully autonomous robots that can perform helpul functions on the campus using AI and other technologies that they are researching.
Here is their Github location with ROS files. https://github.com/utexas-bwi
There has been a huge increase in 2021 of companies getting involved in the robotics simulation area or something similar for commercial or educational purposes.
Here is a list of some simulators:
Roboguide, Robside, Robot expert, RobotStudio, V-REP, Microsofts Robotic Developer Studio, WeBots
Another company doing the robo simulation business is Robologix https://www.robologix.com/software.php
RPA is robotics process automation seems to refer more to the streamlining of how online robots can imporove their effectiveness.
Robocad is simulation software that tries to perfect the manufacturing process.