Sensors are one of the most important parts of any robotic project so lets answer the basic questions first which is,,what are sensors and why are they important to robots and robotics?
Well… sensors to a robot are important just like how our senses are important to a human.
We have a sense of sight that allows us to see the edge of a cliff and not fall off and a sense of hearing so if we hear a loud noise we’ll look up and see what it is, or if we hit our toe on a table leg we have a sense of pain so we’ll move away from the table.
With a robot, if we want it to operate autonomously, or by itself in its environment like a person, we need to add a certain number of sensors so that it won’t bump into objects and so it will know how to find its way around and basically do what it is designed to do.
Now there are dozens of sensors that you can add to a robot and most but not all fall into two broad categories called ultrasonic sensors which have to do with bouncing sound signals around and infrared sensors that rely on bouncing light signals around to do its work.
An industrial robot arm is usually on a fixed base and performs a limited number of actions all day, so it doesn’t need many sensors other than to avoid it hitting or hurting a worker or getting stuck or catching fire. Other types of robots will require more complex sensors and more complex operating software.
This company Matbotix sells Ultrasonic sensors and has some excellent tutorials that explain the various types of sensors that are out in the marketplace. Here is their link. https://www.maxbotix.com/tutorials.htm
We’ve all heard about the self driving cars lately so lets talk a little bit about that and the topic of sensors since they play probably the most important role on a vehicle other than the brakes.
Before we talk mor Elon Musk has been very critical in 2021 about what are called LIDAR sensors and does not have them on his self driving cars.
Most self driving cars have these 4 types of sensors which we will explain in this section: ultrasonic sensors, radar sensors, LIDAR sensors and camera sensors. Okay back to our talk about robots.
So on a robot you would often add electronic sensors on the actual part of the body that it applies most to.
Vision sensors or cameras will go on the head where the eyes are located on a humanoid robot for seeing… bump sensors will often go on the feet or mobile base which will touch something…tilt sensors or gyros might go at the mid point or waist of the robot to tell if the robot has tipped over.
So on the Robosapien toy by WowWee, they put the touch sensors on the toys feet and they put an object detecting sensor on its head so it could see if the owners hand was near its face or its ball was there.
It and the Furby toys had a tilt sensor inside near the waist to tell the robot if it had been knocked over or turned upside down.
The 1999 Robosapien V2 robot toy had some pretty advanced infrared vision sensing and object detection technology for its time.
If you put your hand near the Robsapien V2’s face it would not only react and say something funny based on its object detector seeing something but it would also detect a certain small number of objects like your hand or its blue ball.





Now if we really want to get technical we could say that there are two main categories of sensors….
- propio-ceptive (sensors that respond to things within themselves mostly)
- extero-ceptive (sensors that respond to the outside environment mostly
Propio-ceptive sensors include:
- – potentiometers
- – accelerometers/gyros
- – encoders
Extero-ceptive sensors include:
– laser/Lidar
– ultrasound
-infrared
-force
As you get more advanced in your robot building experience you will learn about AI software like OpenCV that can be almost as easy to use, as cut and paste sotware, to give your robot advanced vision and object detection capability.
So the robotics world is trying to add more and more sensors to their bodies to mimic the human or animal world and even go beyond.
So most toy robots sold today have a handful of sensors that work quite well and something as super sophistocated as a LIDAR is available for under $100 or so and you can get one used on a Roomba like vacuum at a thrift store for $20!
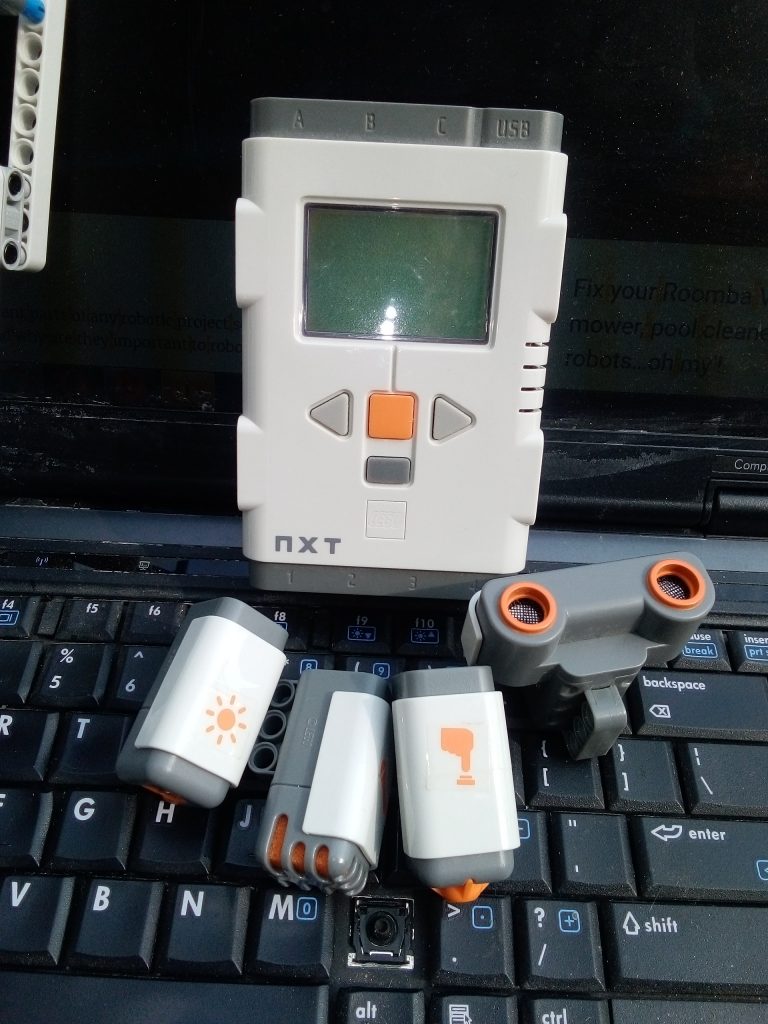
The older Lego Mindstorm toy from 2006 based on the NXT brain has this short handful of sensors: the touch, sound,light and an ultrasonic sensor.
Most basic kids toys and companion pet cats put a handful of touch sensors around the body so that when the person touches or cuddles, it the toy will purr or make some sound to mimic the actual creature it is based on.
So how many types of sensors are there to choose from?
Well…you could categorize sensors in many different ways but some people categorize them like this: –
- – analog versus digital
- – contact versus non-contact
- – absolute position versus non absolute position
- – and active versus passive.
But lets keep it to the simple matter of what sensors are in our everyday world.
Well just ask yourself what humans respond to and then we can assume that somebody probably has invented a sensor to replicate it.
We often start by assuming that people just have the basic 4 senses found in your head like the following:
- – sense of touch
- – taste
- – smell
- – hearing
- – temperature
- – and perhaps the sense of balance.
It can get very complicated in a hurry if you wanted to try to make touch sensors that could react to the different types of surfaces that your robot could touch…like walking on a hard surface or a soft furry surface or a wet or dry surface or hot or cold etc.
The advanced robot must be programmed to at least react to whether it is walking into water or into a radiation zone or perhaps somewhere that a fire is blazing away.
We have probably all heard that if you get a problem in your inner ear than you may have a hard time walking properly since your sense of balance or equilibrium is somehow affected there.
Well humans have many more than just your handful of senses and many studies are showing that we have in fact 21 senses and many of them have to do with your balance.
Just think about the old expression that she had a “bad feeling” about going into that room based on her “womens intuition” or that a cold feeling came over me when I went into that room.
Some people claim that they have extra powers or senses to see, or communicate with ghosts and we won’t debate that possibility here at this time.
There is a very informative Makerfaire broadcast video by “Engadget” about humanoid robots where a few top robotocists like Mark Setrakian, Chris Ristow and Gui Cavalcanti talked about the robot business.
For example when we walk we use 3 senses…the sense of balance and your sense of “propriception” (knowing where your limbs are) and your kinestetic sense (which is shown when you can find your nose when your eyes are closed).
During this broadcast they brought up the following senses: (sight, smell, hearing, taste, thirst, hunger, touch, pressure, proprio-ception, noci-ception, equilibrio-ception, stretch receptors, chemoreceptors, magneticoreception, sense of time and a few others…

So lets go back now and talk about a few basic sensors.
An edge detection sensor could prevent a small robot from falling off a table. A tilt sensor can let the robot know if its upside down and that something should be done about it. There are countless sensors like heat and gas and noise and smoke and distance and speed sensors which we will talk about.

Once a sensor senses something than of course an action would take place. The advanced robots are being created to have special vision and object or facial recognition features so they can respond to a user walking into its field of view. We can then start getting into the more complex areas of AI at that point.
Some other sensors and terms that we will soon describe more clearly include: accelerometer sensors, biometric, computer and vision sensors, contact and proximity sensors, current and voltage sensors, inertia measurement unit sensors, IR light sensors, localization sensors, LIDAR (light detection and ranging), magnetic/pressure/radar/sound, stretch and bend sensors, temp and humidity sensors, ultrasonic , vibration and more.
There are dozens if not hundreds of sensors used in robotics.
Sensors in terms of robotics are usually electronic devices which detect and measure changes in the environment around the robot which sends the information to other devices in the robot to do something.
Whether it is an autonomous wheeled robot or a humanoid the sensors allow the robot to navigate around its environment.
A basic $800 vacuum robot will have bump sensors around it so it will hit the wall and back up. A rolling toy will have edge sensors so it won’t fall off a table. Other robots may have object detection sensors in the head so it will either see some unknown object coming at it or if it has the more advanced software like an Anki toy and hardware working then it may be able to recognize actual objects or the owners face and respond with a audible welcome message.
There are sonar sensors which use sound pulses to measure distance. It turns out that the time it takes for a pulse sound to bounce off an object and return to the sensor which is proportional to the distance.
There are two main types of light sensors photoresistor and photovoltaic cells.
Light sensors are used to detect light and then will create a change in voltage.
A photoresisistor will change its resistance depending on how much light it receives.
There is a simple sound sensor that you can add to a robot so that when it hears a car horn or a hand clap some action will take place. You add a microphone and then when a sound is heard it will result in a change in voltage.
In warehouses like Amazon, many of the robots follow a straight path lifting up its shelf pallets and moving them all around a huge facility.
Some warehouses have marks on the ground or sensors that the robots roll over and use that to navigate as opposed to moving more randomly like your house robot vacuum may do.
So if you make your own simple rolling robot you could put in sensors so that it simply follows a black line that you make on the floor , or you could have it avoid obstacles or it could have sensors that react to sound or sight.
The black line or black tape that you lay down absorbs infrared light so your robot will have a ir transmitter and a detector to determine when it moves over the black line where it should follow.
Some companies that sell these are on sites like Wish and Amazon and have company names like Pololu, Sparkfun etc
Reflectance sensors are used for two main thins to detect an edge so it wont fall off and to follow a line if you want to make a simple robot to follow some lines on the ground.
You will usually have to incorporate an amplifier becuase sound sensors do not create a very big difference in voltage.
Touch or contact or bumper sensors are used in most toy robots to as part of the obstacle avoidance in a car robot or to get a audio reaction like a purring sound if it was a cat robot that was touched. Furby toys of certain generation had touch sensors on their heads, feet, stomach.
The vex robotic crab has 6 inch long touch sensors in the front and back to help it avoid obstacles. They are an example of what is called leaf switch sensors.
Many people 30 or so years ago first saw an example of simple sound sensor when they purchased a device called a clapper. You would plug a lamp into the unit and if you clapped it would turn off the lamp and if you clapped twice it would turn it on.
The furby toy and the Robosapien has similar sound sensors which when they hear a clap will react. Furby will wake up if its sleeping and start talking and the robosapien will sound surprised and say something like “whats that!”
Proximity sensors detect objects without having to actually touch them like with a contact sensor. A transmitter sends a signal out and the receiver analyzes the signal for interuptions
some of the main kinds are
- infrared. An IR signal is sent out and if it hits something the signal bounces back and is read by the ir receiver.
- untrasonic. This are deals with sound waves and also deals with sending and receiving back a signal that bounces off an object
Tilt sensors are popular in older toys like the Furby. There is a tiny container with a metal ball inside that moves when the doll is turned upside down at which pint it will wake up and say something.- Navigational sensor or positional sensors:
- Gyroscope
Vision and Imaging Sensors.
People usually try to compare different technologies like ultrasonic sensors and LiDAR and generally find ultrasonic good for indoor short range use and LiDAR for outdoor longer range use.
Radars are usually in self driving cars to do things like forward collision warning, automatic emergency braking and emergency brake support, and lane departure warning.
Tesla reported that they were moving to a new system called ‘Tesla Vision” which will use cameras and the neural network and their autopilot and other things.
They do also use short range sonar sensors.
Now back to LiDAR. Its all about shooting a beam at some object and measuring the time it takes to come back.
Light emitted from the LiDAR is called pulse and the light reflected back from an object is called return.
Its been said that adding a LiDAR to a self driving car can add $10,000 to the cost.
But at least for hobby level robots you can add LiDAR technology to your creation for hundreds of dollars.
A company called DFRobot sells several types of very affordable LiDAR. One is a $40 TF mini-S LiDAR sensor and there are several RPI LiDARs which are full scanning sensors on a platform with a motor and sells for $100 and around $400.
https://www.dfrobot.com/category-36.html
Temperature Sensors.

Radiation Sensors.
Pressure Sensors.
Position Sensors.
Photoelectric Sensors.
Particle Sensors

end effectors are the name for the hands or a robot. They could be simple two finger like grippers or a full hand or a magnetic grip or you could use them in an industrial setting and have a welding torch as the end effector of a spray paint gun.
batteries
brackets/hardware
hydraulics/pheumatics