Robot engineers are starting to realize some limitations to using electricity to power their creations. Electric servos and actuators can be noisy and have a hard time generating enough torque to move the heavier arms and legs that they are building. So hydraulics and pneumatics are some of the older technologies that are being looked at again in new ways to solve some of these challenges.

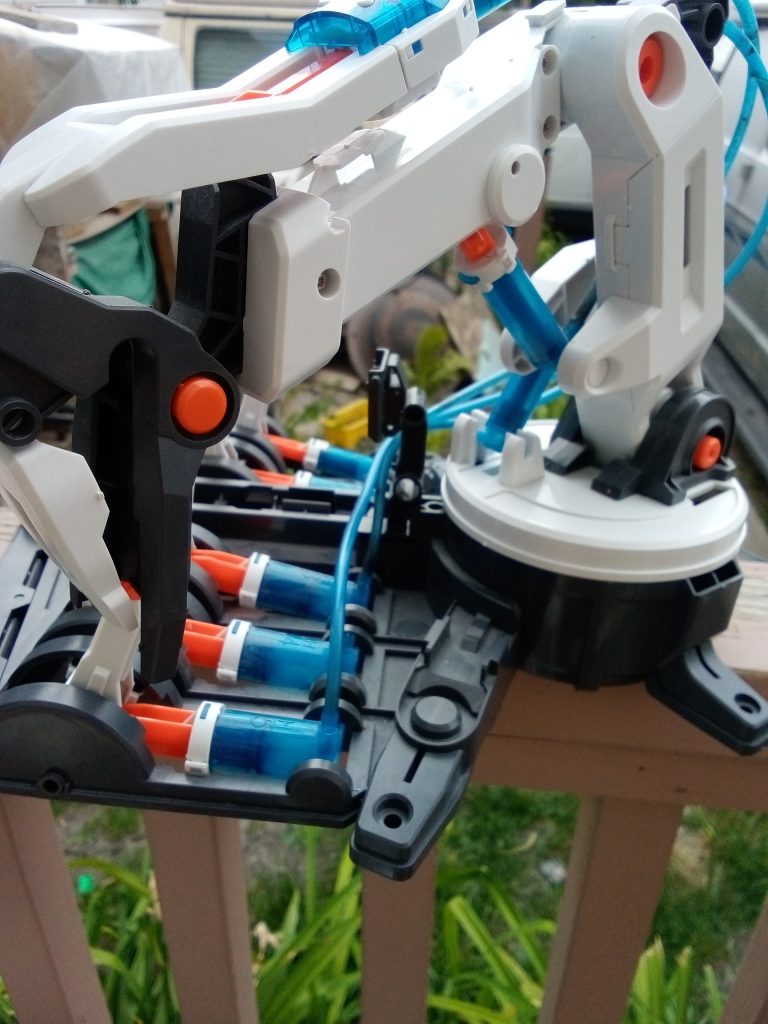
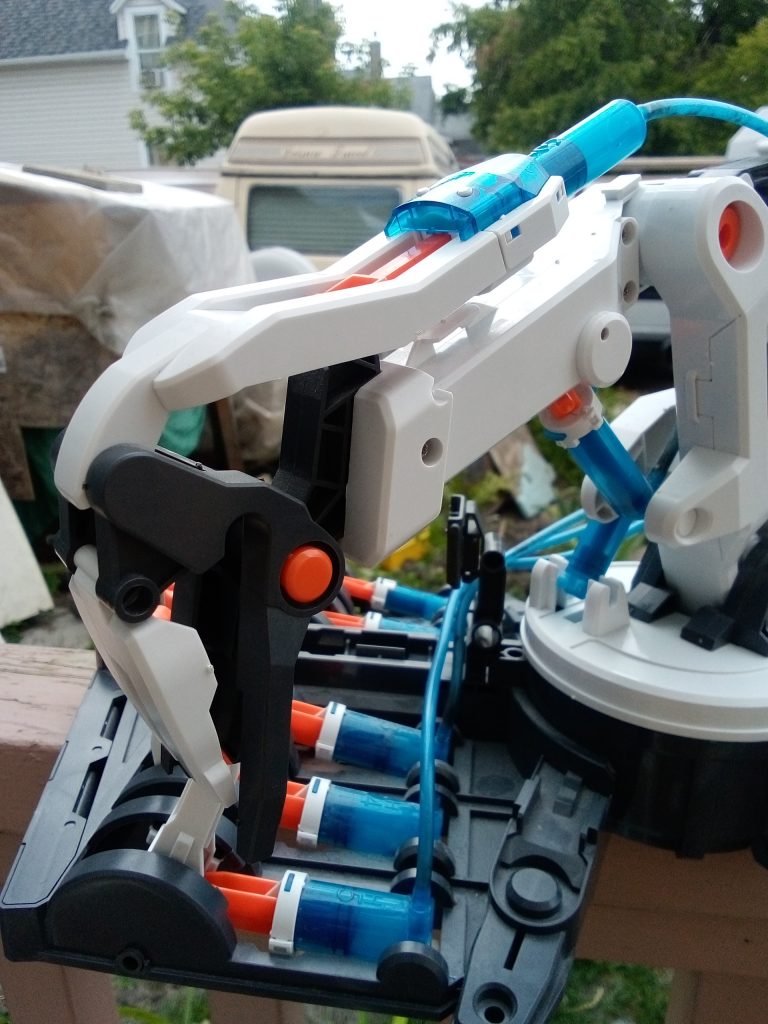
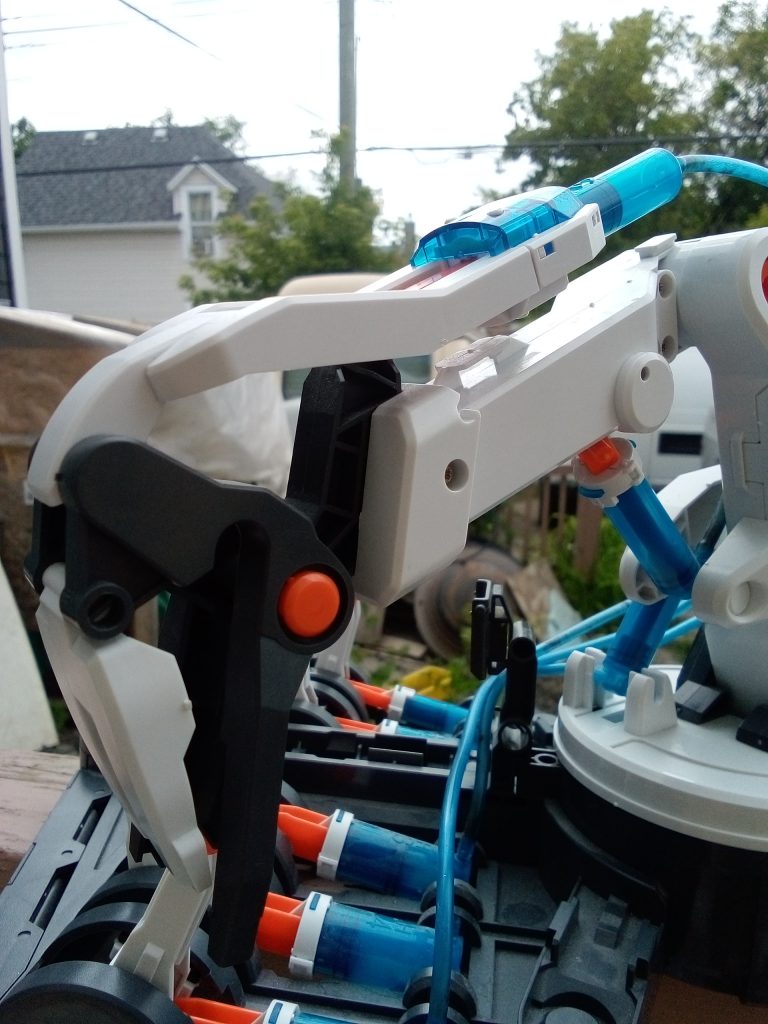
Artificial muscles with names like McKibben and Hasel are being explored with encouraging results.