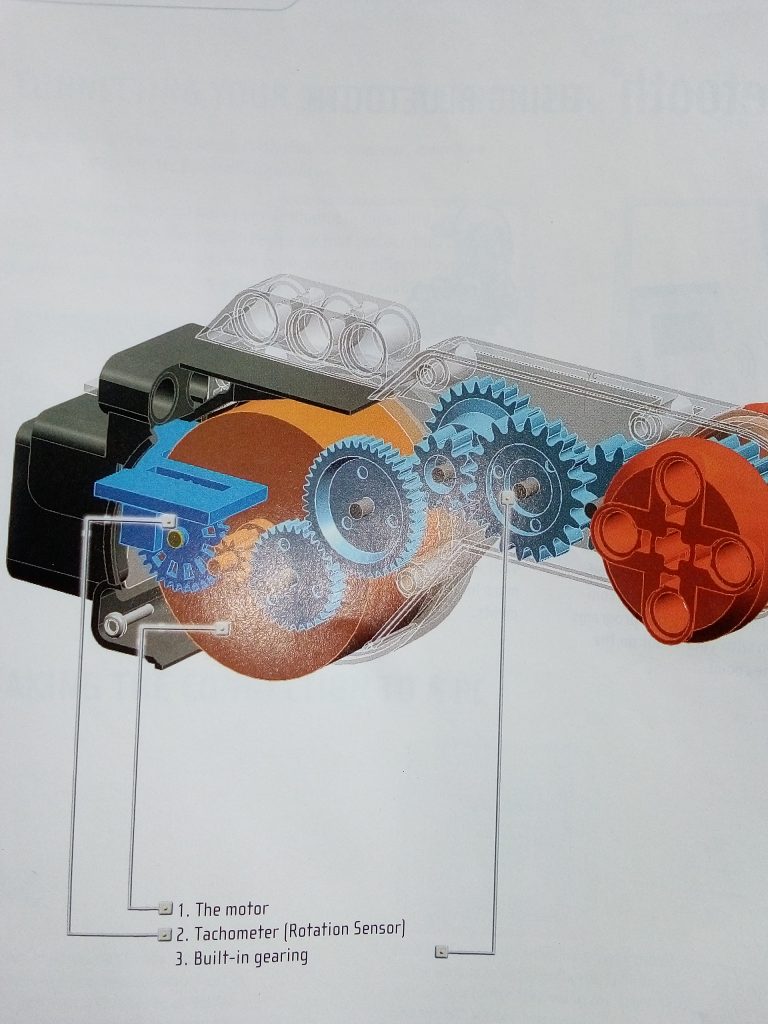
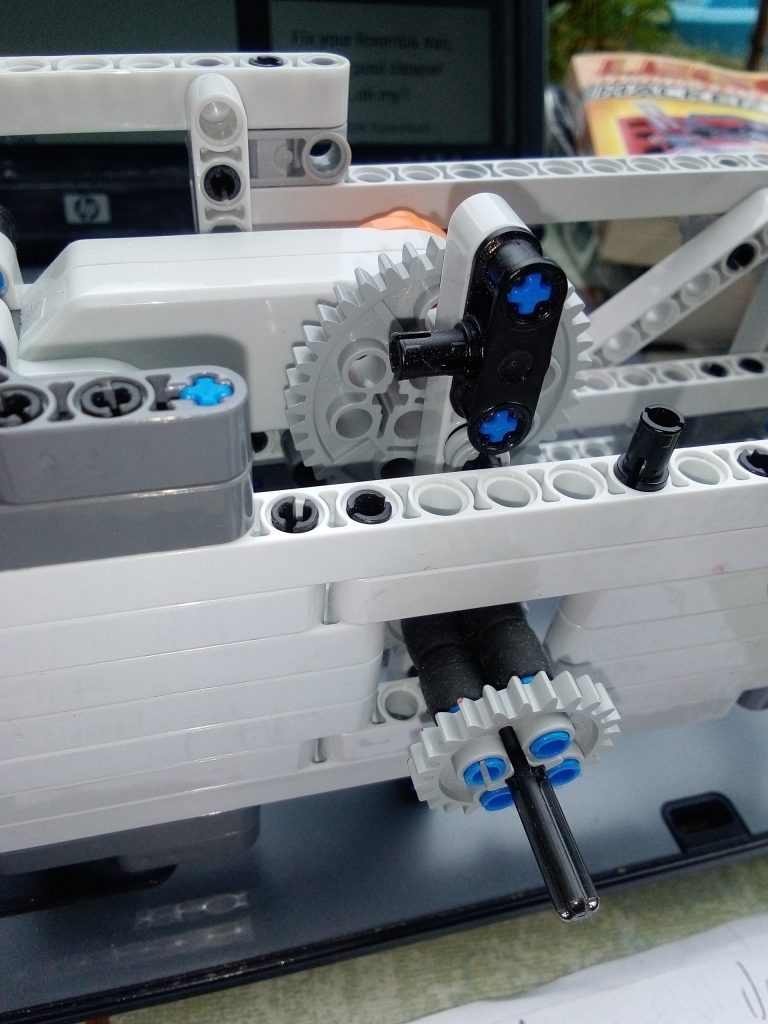
In this section we will talk about basic mechanics and gears.
Industrial robot arms will usually have the following 4 main structural parts:
- base (which is usually on a table or a mount)
- link(s) (parts of the arm giving an extension to the arm)
- joint (where the swivel can take place & is called a DOF)
- end effector (like a gripper hand)
The humanoid arm will have very much the same form as the industrial arm and the legs will be similar.
Now lets explain the concepts o links and joints.
You will number the links and joints starting from zero from the base outwards and will refer to the first link at the base as the input link which connects to the first joint and then the attached joint will be the output joint.




There are 5 main types of joints with the following name classifications:
- linear (L)
- orthogonal (O)
- rotational (R)
- twist (T)
- revolving (V)
The L joint is one in which one input link goes into and out of another link almost like a piston.
The O joint looks a little like a T formation and is where the input link can turn on the output link.
Both of these two joints are called prismatic joints.
The rotational joint looks like an arm bending at the elbow and in this case the output link is moving up and down like the forearm bending at the elbow.
The twisting or t joint is like a robot spinning around at its base.
The revolving joint will usually be at the end effector.
Now if we were to relate these joints to the human body since we are trying to copy the movement of the body we would refer to the 6 types of movable human joints called the sinovial joints.
- hinge (just like a door. limited movement on one axis) found on the eblow
- pivot (found on the forearm which allows it to twist)
- ball and socket (flexion/extension/abduction/adduction/rotation/curcumduction)hip & shoulder
- ellipsoid (found in the wrist) it is like the ball & socket but less movement
- saddle (joint of the thumb)
- plane (found in the shoulder area and carpals in hand and tarsals in foot)
We could then talk about how the spine hooks up the 3 main parts of the body: head, ribs and torso.
The spine has 24 vertabrae bones with cartilage between them to give them flexibility and is divided into 4 main parts.
These 4 parts are curved which helps to balance a human which is something to consider when building robots…don’t think totally straight lines.
For example, wi*We will shoot new videos for this section later. (its now June 19)


For now here is just a sample of a video shot in 1997 about Java