Lets look at this guys guts.



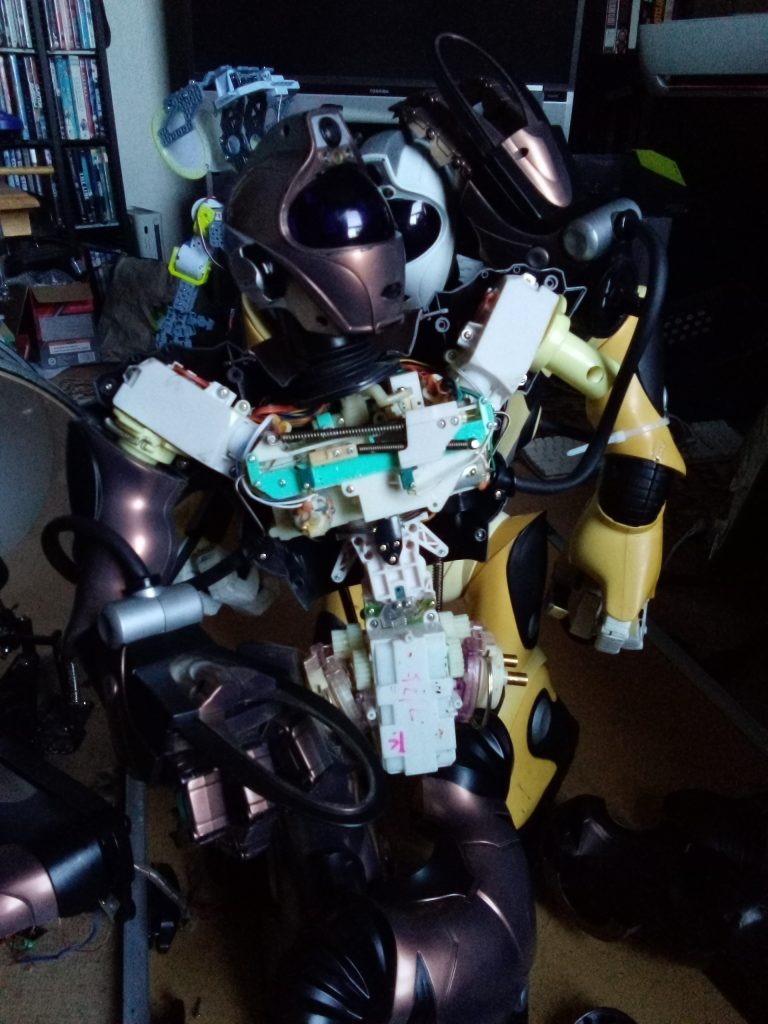


ROBOSPIEN RS V2 Cut open:
The original Robosapien has 67 pre-programmed instructions and is built in an old school analog way with 24 transistors.
There are no servos and no microprocessors in it.
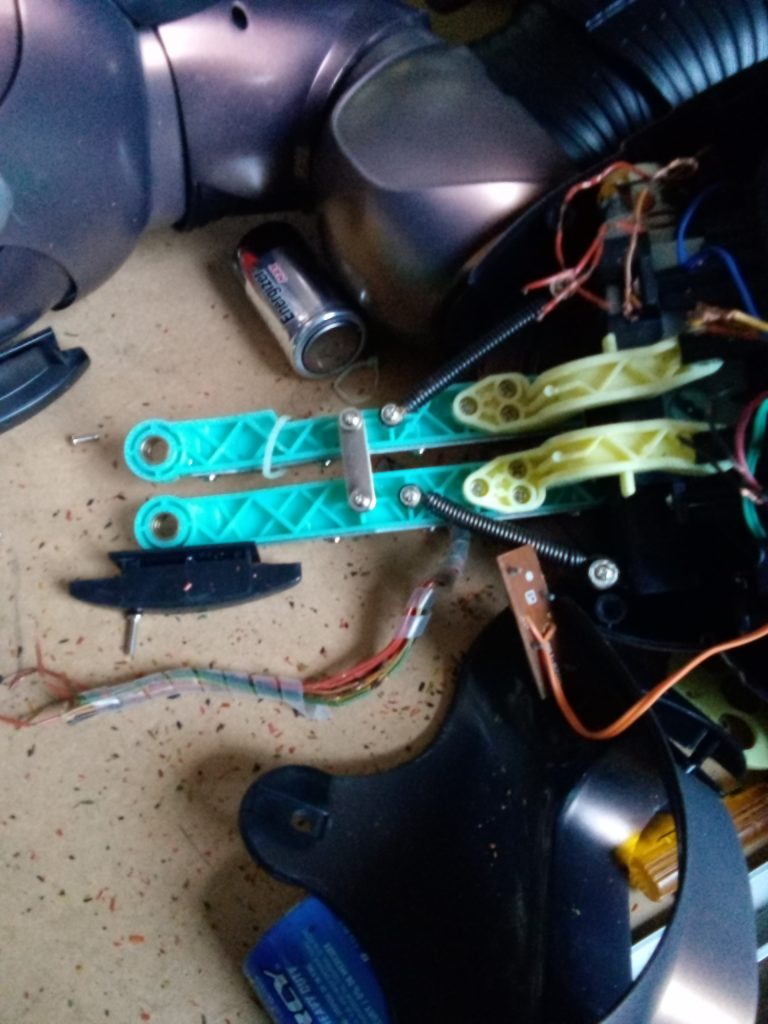
All the motor axes all rotate
It has a motor in both shoulders, one in both elbows, only one in each leg, and one at the waist.
The two long fingers on each hand has the touch sensors that make the robot go back when it touches a wall. There are also one each on the front and back of each foot.
It has two simple red Led lights where the eyes are.
It has a microphone for a sound sensor on the chest in plate.
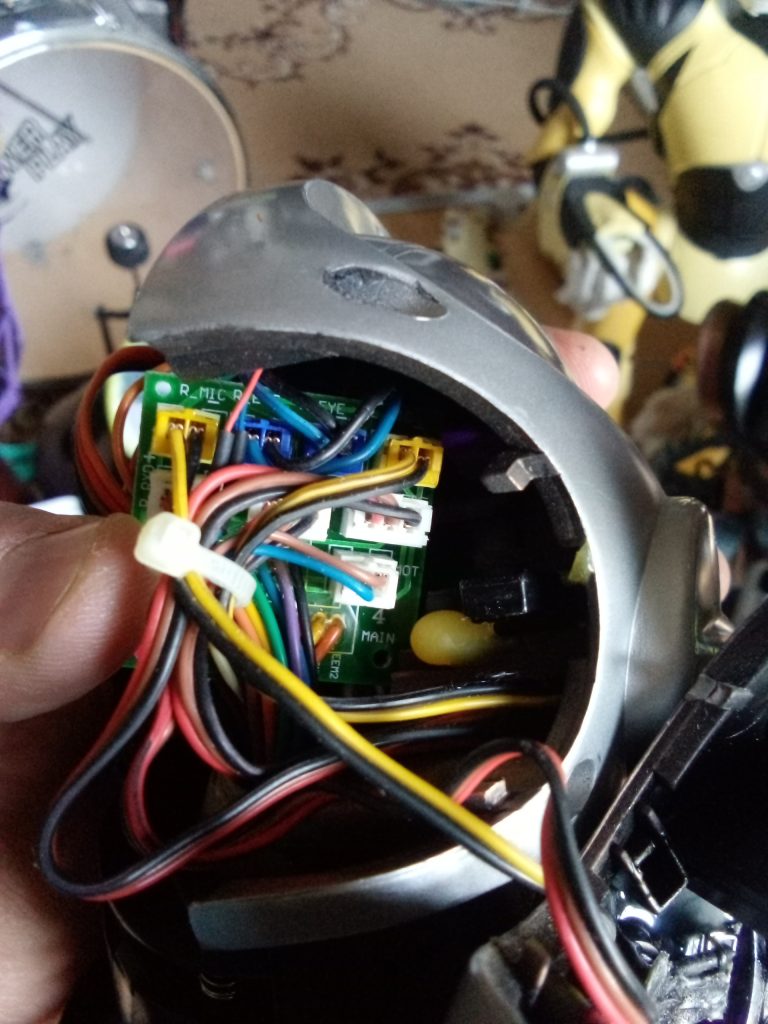
A few hacker sites say that it uses the Atmel CPU control circuit board
The 2004 model had 6 touch sensors, 7 motors and 1 audio sensor.
In the head is the V2s infrared vision sensor and a color camera which can idenitify its blue ball or red bowling pins or your hand. It has stereo sonic sensors where its ears are to detect a hand clap.
It has gauntlet sensors on each hand.
The Robosapien V2 (RSV2) had 13 motors and 1400 components
The Robosapien RS came after the RSV2 and was a linux based robot with more features.
-It is a linux ARM .
2008 Femosapien – 5 motors, 6 battery, has 14 controls?